Facade Cleaning Robot.

The Challenge & Vision
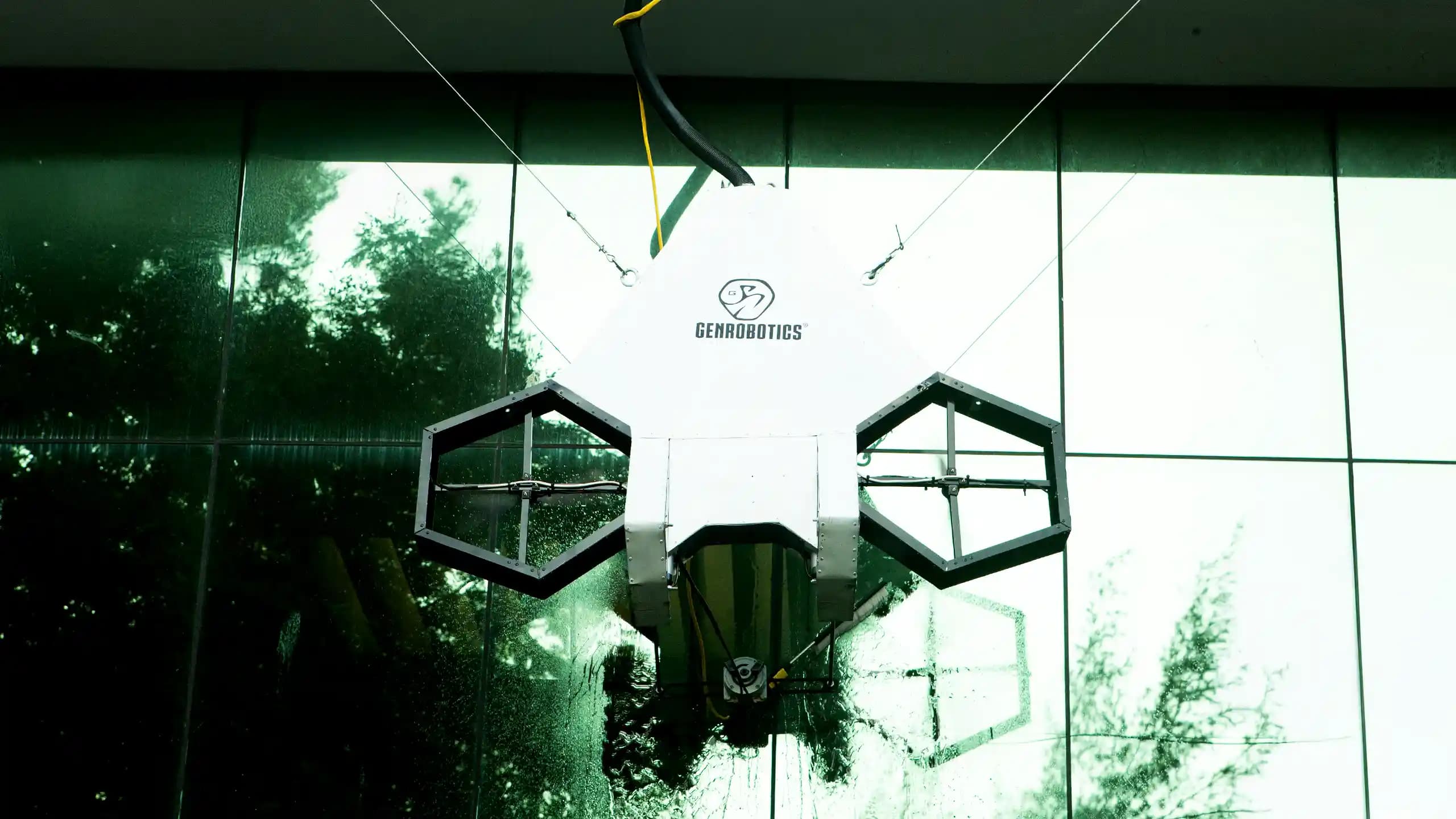
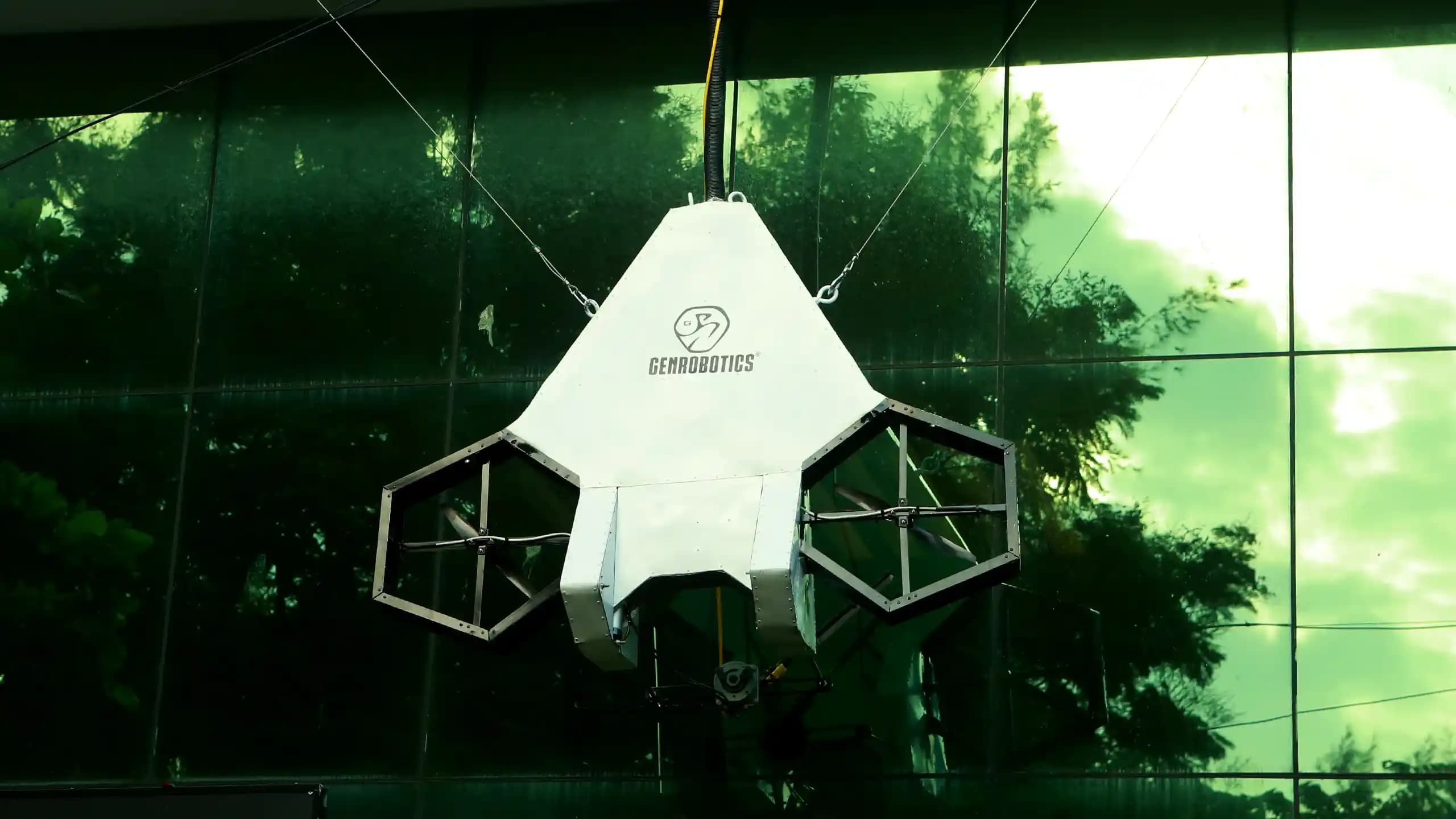
The G Beetle project addresses the costly and hazardous nature of traditional façade maintenance. Our research focuses on developing a robot that ensures a safe, consistent, and highly efficient solution for cleaning high-rise exteriors and complex architectural surfaces.
Key R&D Breakthroughs:
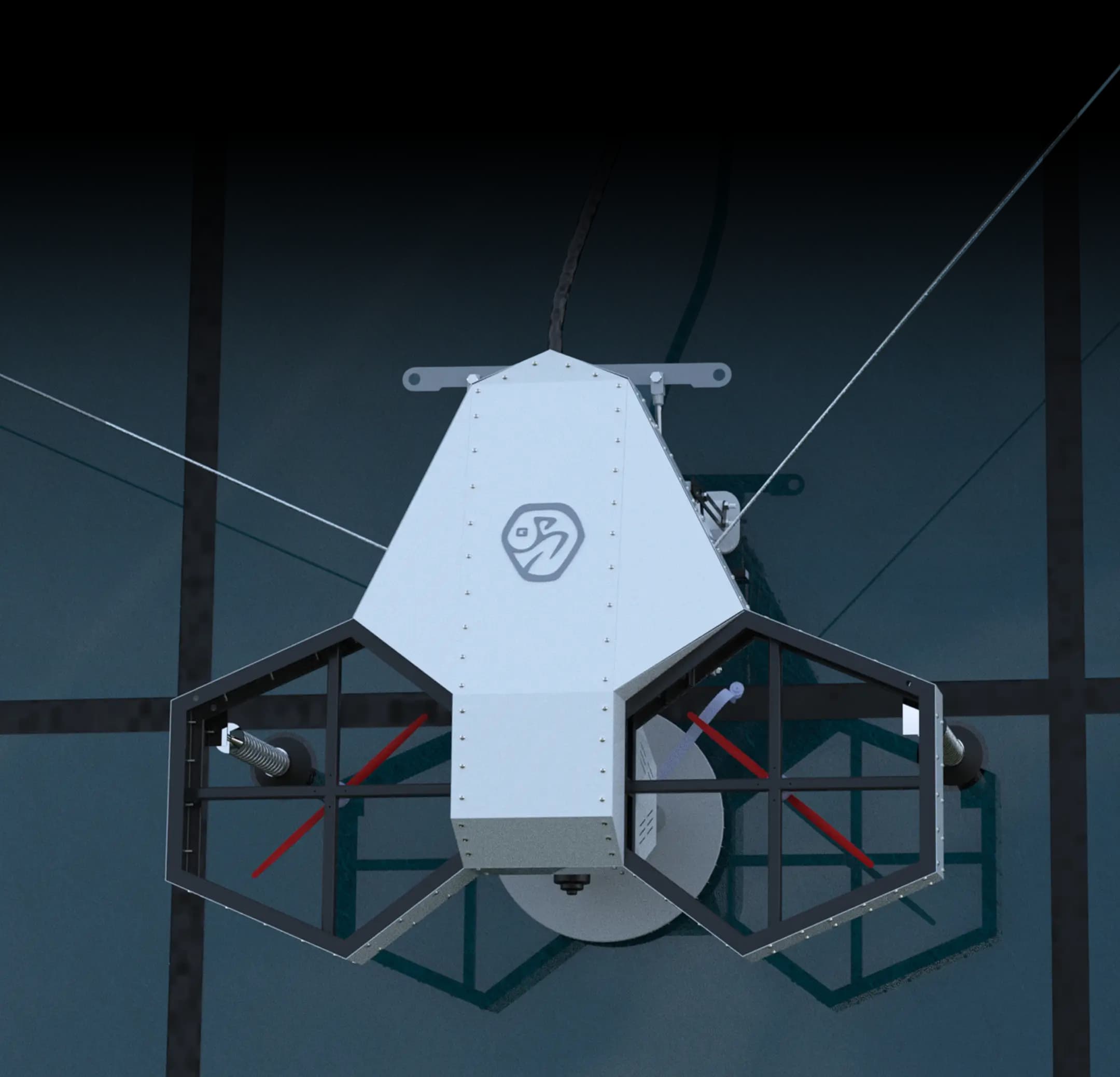
- 1.Pneumatic/Vacuum Adhesion System: Engineering reliable grip on varied materials like glass, concrete, and metal.
- 2.Vision-Based Surface Mapping: Developing AI to identify dirt levels and optimize cleaning paths to minimize resource use.
- 3.Modular Cleaning Head: Creating interchangeable tools for specialized cleaning applications.

Technical Specifications
Mobility
Vacuum Adhesion/ Tracked Wheels
Cleaning Width
1.5m
(Estimated)Sensors
High-Res Camera, Proximity, Pressure
Development Roadmap
Our development plan for G Beetle prioritizes safety, reliability, and the ability to operate across diverse architectural surfaces.
Phase 1
Proof of Concept & Adhesion Modeling (Completed)
Validating the core pneumatic grip technology and optimizing materials selection for surface compatibility.
Phase 2
Mobility & Navigation Integration (Completed)
Developing the tracked movement system and implementing initial sensor-based path planning algorithms.
Phase 3
Field Trials (Current)
Rigorous testing in controlled and simulated urban environments, focusing on cleaning efficiency and operational stability across varied facade types.
Phase 4
Autonomy & Advanced Cleaning (Future)
Implementing AI for deep dirt analysis, automated tool switching, and weather adaptation for safe operation.
Development Highlights